

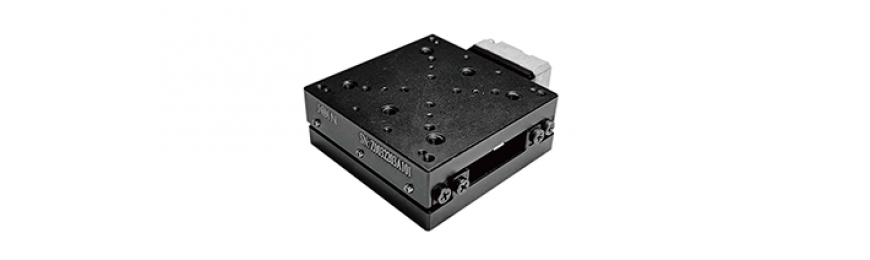
納米位移臺線性誤差的來源分析
納米位移臺的 線性誤差(即實際位移與理論位移不完全一致)是影響定位精度的重要因素,其來源可以從機械、電氣和控制三個方面分析:
1. 機械結構因素
導軌或滑塊幾何誤差
導軌直線度、平行度、傾斜度等不理想會導致位移偏差。
絲杠或螺桿傳動誤差
螺距誤差、螺桿旋轉軸與導向軸不完全同軸,會引起累積位移誤差。
柔性驅...

納米位移臺線性誤差校準方法與步驟
納米位移臺的線性誤差校準是提高定位精度的關鍵環節,通常結合 測量(干涉儀或光柵尺)和 閉環補償 來完成。下面整理常用方法與具體步驟:
1. 校準原理
核心思路:測量臺面實際位移與理論位移的差值,構建誤差補償表或函數,在控制系統中進行補償。
校準可分為 靜態校準(慢速步進)和 動態校準(連續運動)兩類。
2. 校...
納米位移臺移動速度如何調整?
納米位移臺的移動速度通常可以通過 控制系統設置 來調整,不同類型的驅動方式(壓電、步進電機、直線電機等)有不同的調節方法。整體上可以從以下幾個方面來理解和操作:
1. 控制參數設置
速度參數
控制軟件或驅動器面板一般提供“速度”設置項,可以直接設定移動速度值。
單位通常是 μm/s、mm/s,或電壓/步進頻率。
加速...

納米位移臺如何實現超長行程移動?
納米位移臺一般依靠壓電陶瓷驅動器或精密電機實現運動,其單次行程往往受到材料變形量、驅動電壓和結構設計的限制,通常在微米到毫米級范圍。如果要實現超長行程移動,可以采用以下幾種方法:
步進掃描(步進位移臺):利用壓電陶瓷的“爬行驅動”方式(stick-slip 或 inertial drive),通過連續的小步位移疊加,實現厘米...
納米位移臺誤操作防護方法
在納米位移臺 使用中,誤操作可能導致 臺體損傷、樣品碰撞、精度損失或安全事故。設計防護措施時,需要結合 硬件、軟件和操作規程 多方面考慮。下面整理系統方案:
1. 硬件防護
限位裝置
機械限位:在臺體兩端安裝微動開關或擋塊,防止過行程。
軟件限位:在控制系統設置最大/最小行程范圍,超出即停止運動。
緩沖結構
...

納米位移臺自熱效應及減緩方法
納米位移臺在高速運動或長時間連續工作時,自熱效應(self-heating) 是一個非常重要的問題,它會影響定位精度和長期穩定性。下面我給你系統整理原因、表現以及減緩方法:
1. 自熱效應原因
電機發熱
驅動納米位移臺的電機(如步進電機、直線電機或壓電驅動器)在連續工作時會發熱。
驅動器電流損耗。
長時間大電流驅動 →...